https://github.com/erwincoumans/pybullet_robots
Prototyping robots for PyBullet (F1/10 MIT Racecar, Sawyer, Baxter and Dobot arm, Boston Dynamics Atlas and Botlab environment)
https://github.com/erwincoumans/pybullet_robots
Last synced: 9 months ago
JSON representation
Prototyping robots for PyBullet (F1/10 MIT Racecar, Sawyer, Baxter and Dobot arm, Boston Dynamics Atlas and Botlab environment)
- Host: GitHub
- URL: https://github.com/erwincoumans/pybullet_robots
- Owner: erwincoumans
- Created: 2017-10-10T18:40:46.000Z (almost 9 years ago)
- Default Branch: master
- Last Pushed: 2020-01-09T06:18:45.000Z (over 6 years ago)
- Last Synced: 2025-03-29T00:06:54.923Z (over 1 year ago)
- Language: Python
- Homepage: http://pybullet.org
- Size: 96.6 MB
- Stars: 517
- Watchers: 25
- Forks: 199
- Open Issues: 9
-
Metadata Files:
- Readme: README.md
Awesome Lists containing this project
- awesome-simulation - pybullet_robots - Prototyping robots for PyBullet ([PyBullet](https://github.com/bulletphysics/bullet3))
README
# pybullet_robots
Prototyping robots for PyBullet (F1/10 MIT Racecar, Sawyer, Baxter and Dobot arm, Boston Dynamics Atlas, Cassie, Laikago and Botlab environment)
# Install of PyBullet
pip install pybullet
See also the [PyBullet Quickstart Guide](https://docs.google.com/document/d/10sXEhzFRSnvFcl3XxNGhnD4N2SedqwdAvK3dsihxVUA/edit#heading=h.2ye70wns7io3)
Pictures of some of the robots:
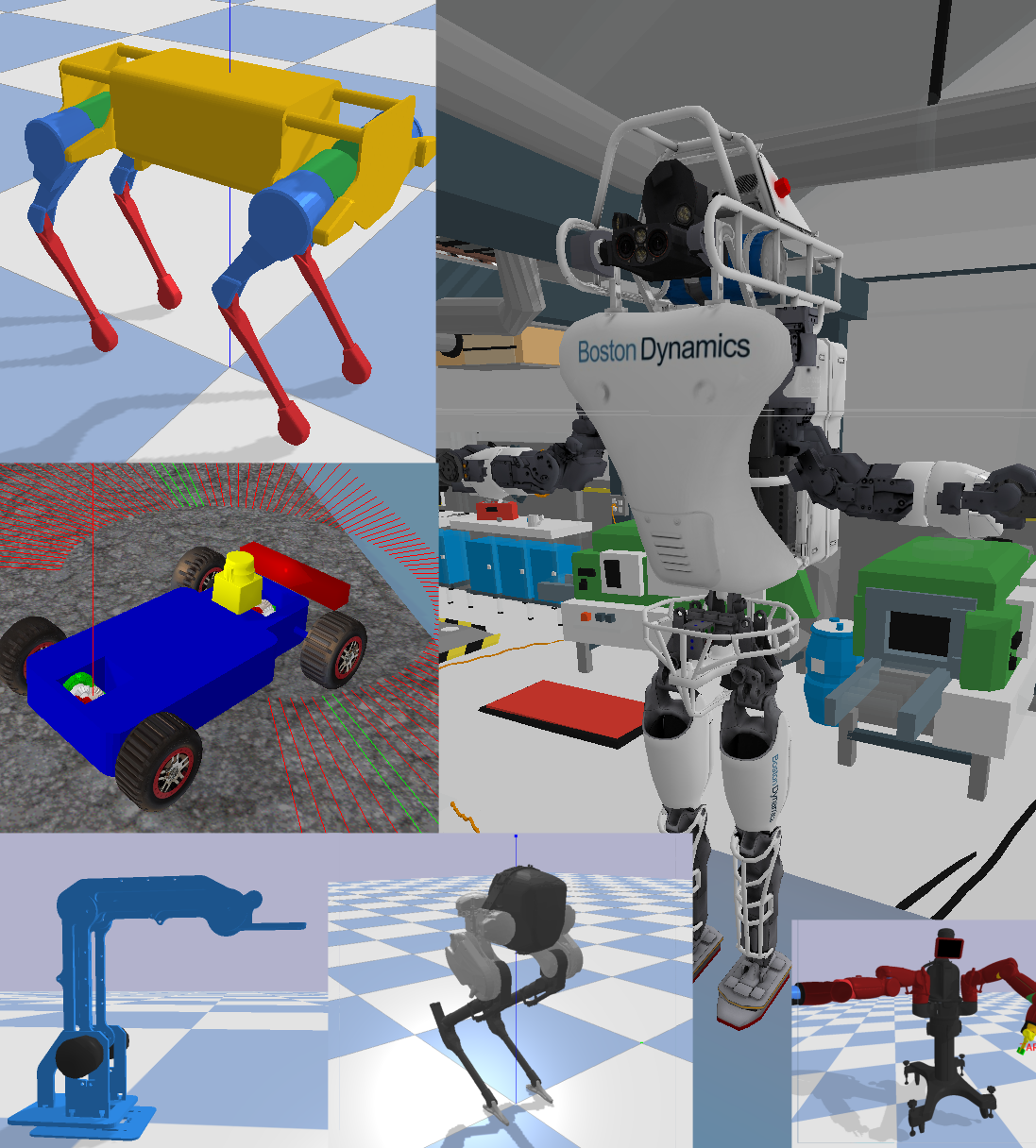
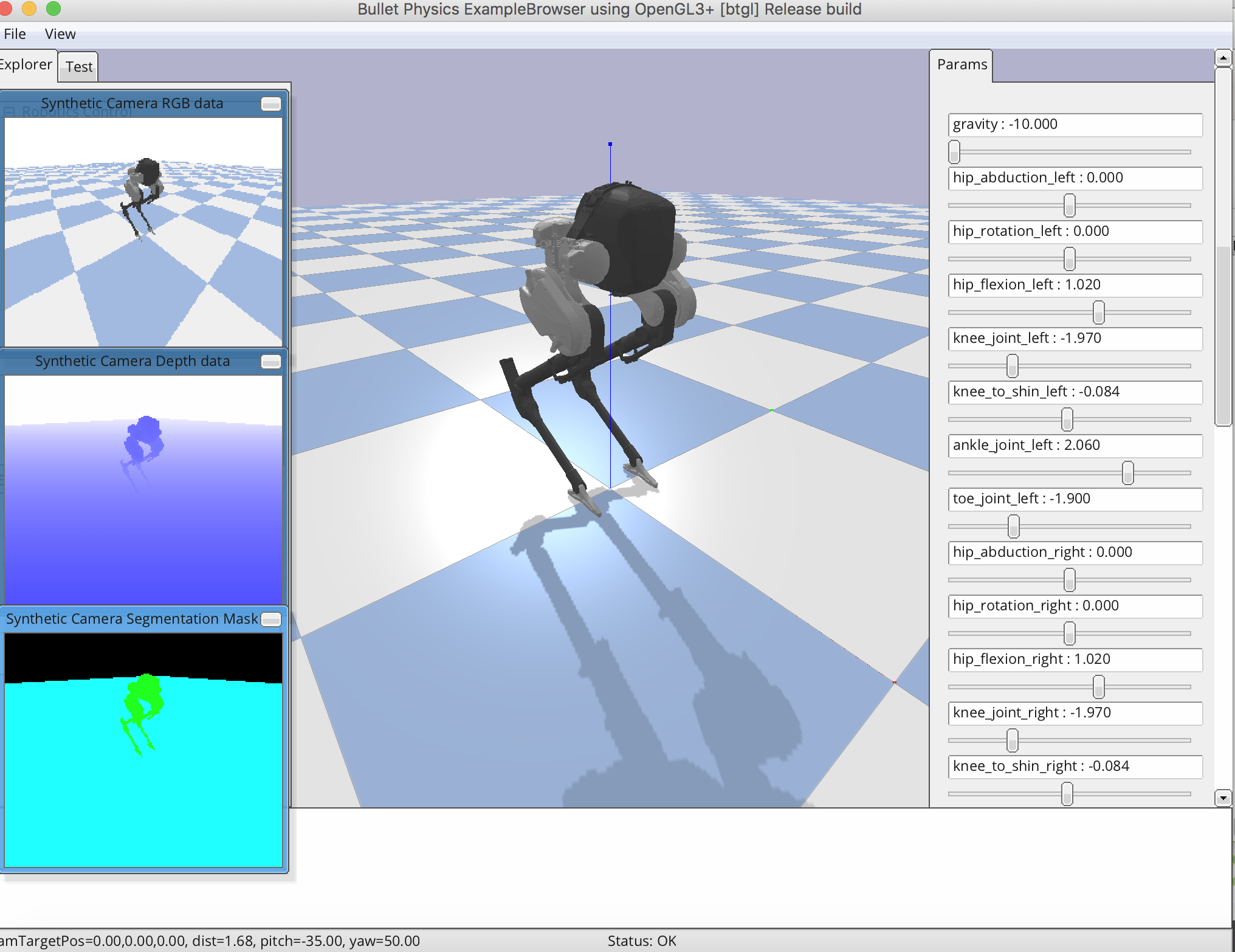
Cassie biped:
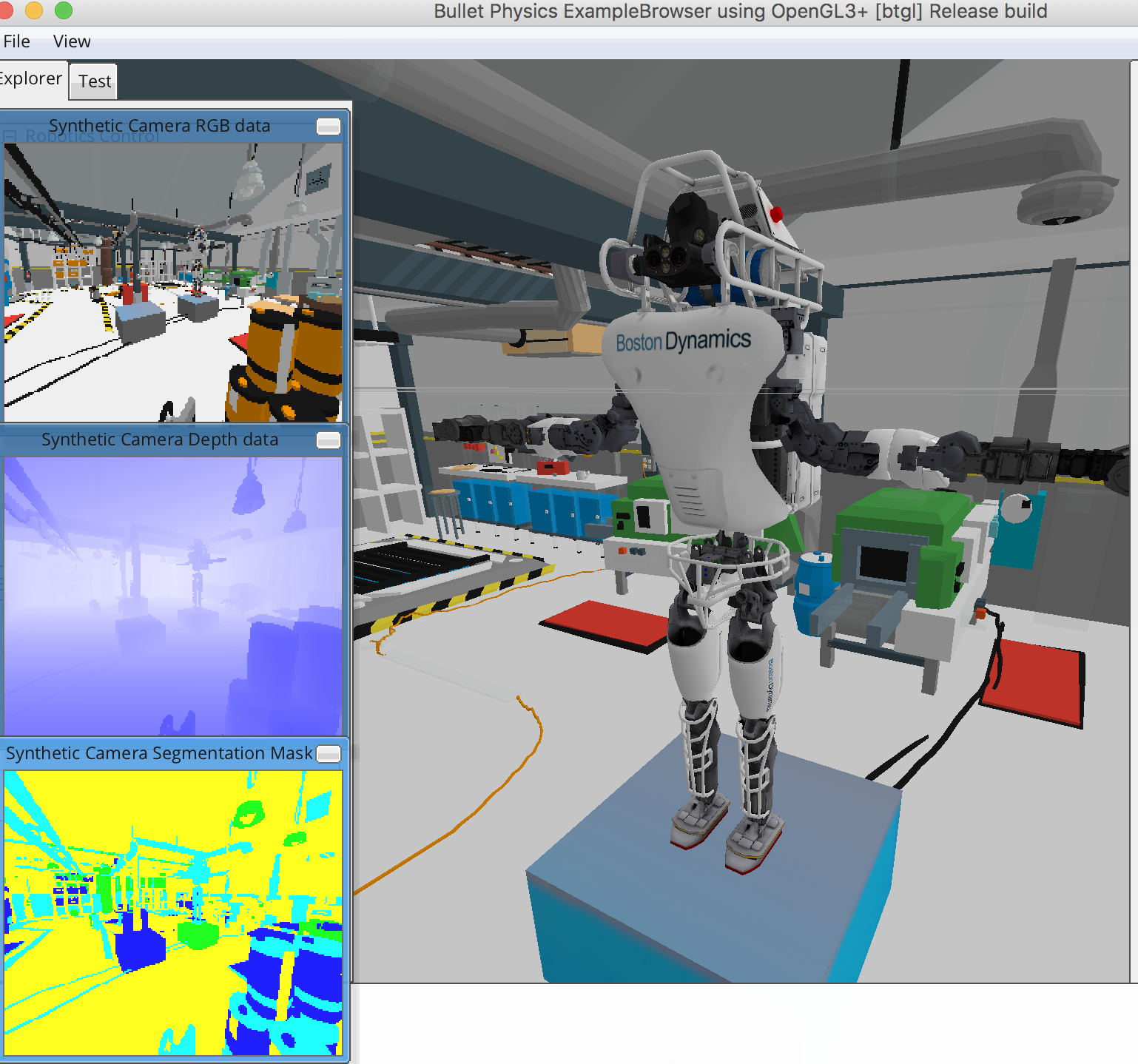
Boston Dynamics Atlas:
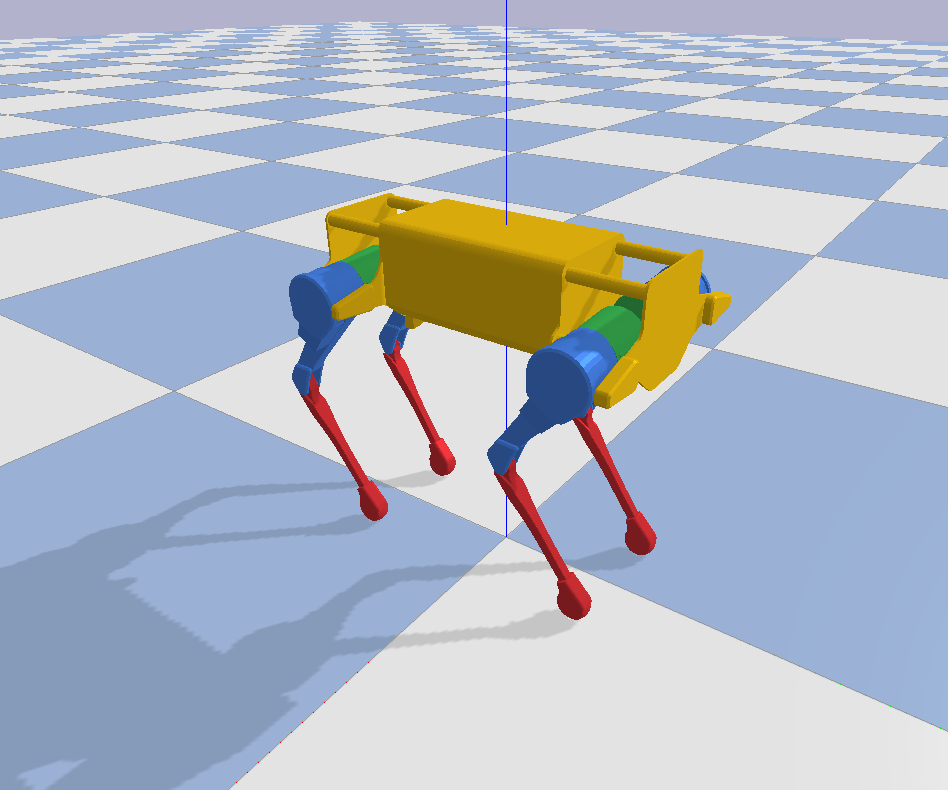
Unitree Laikago:
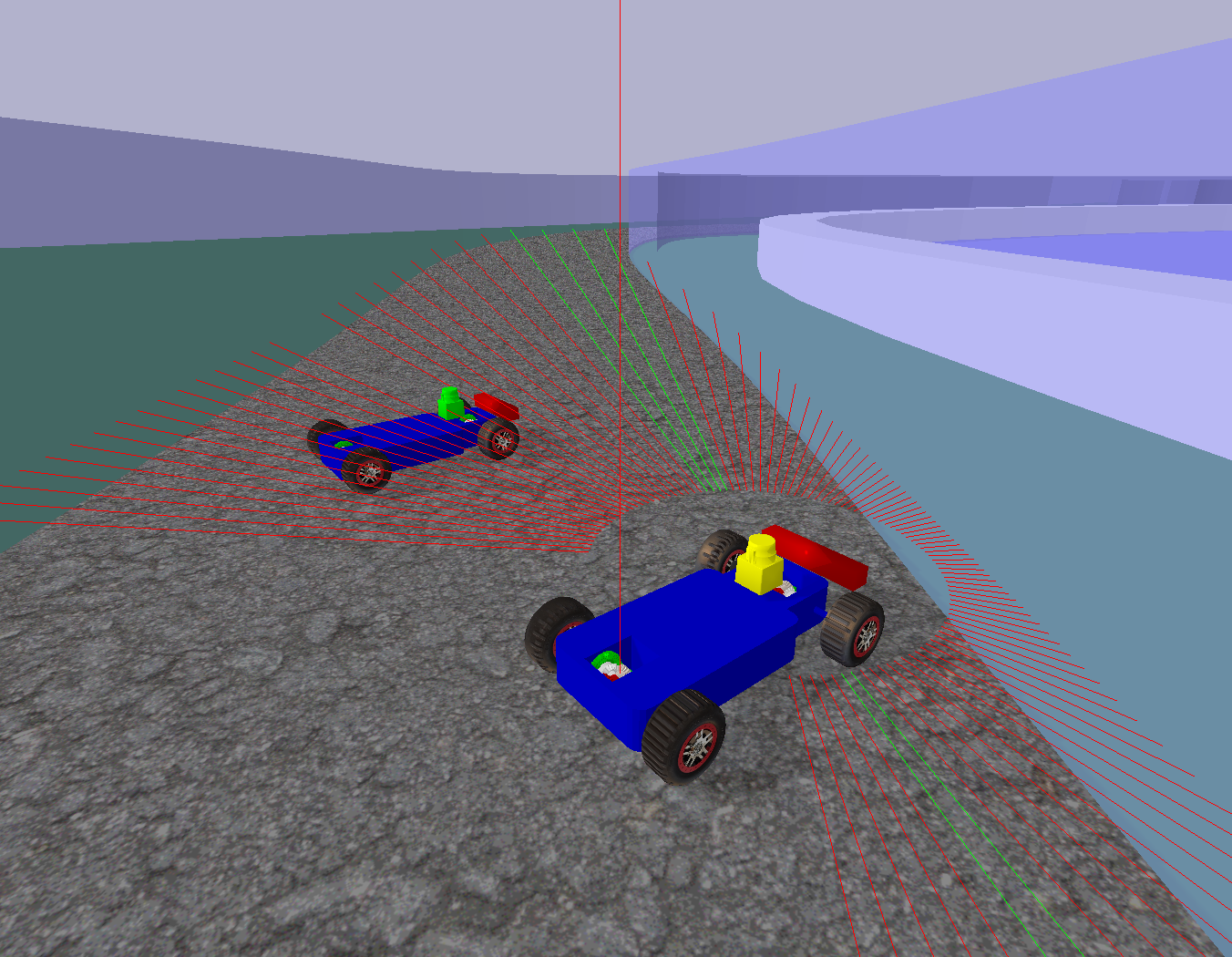
F1/10 Racecar:
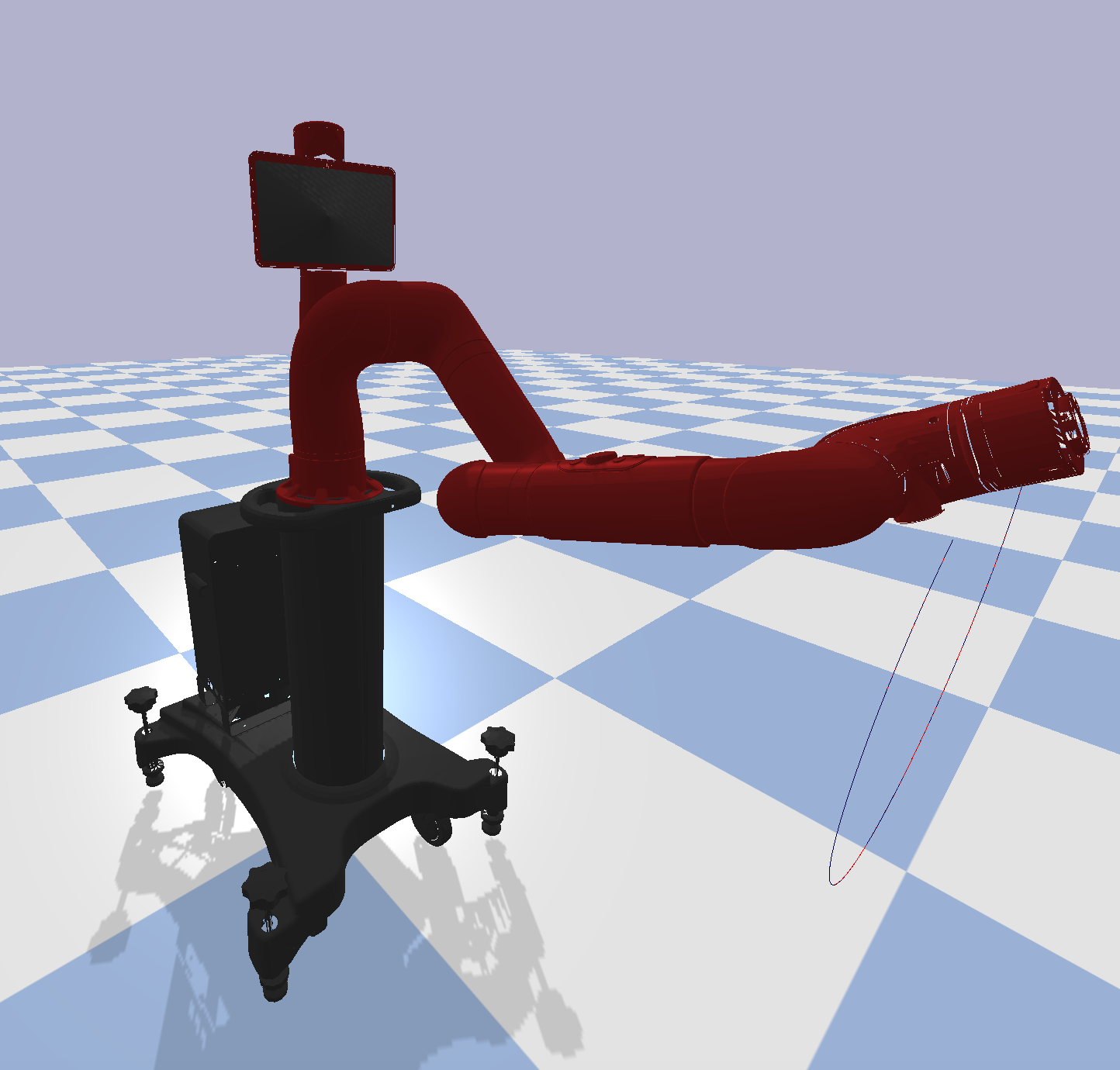
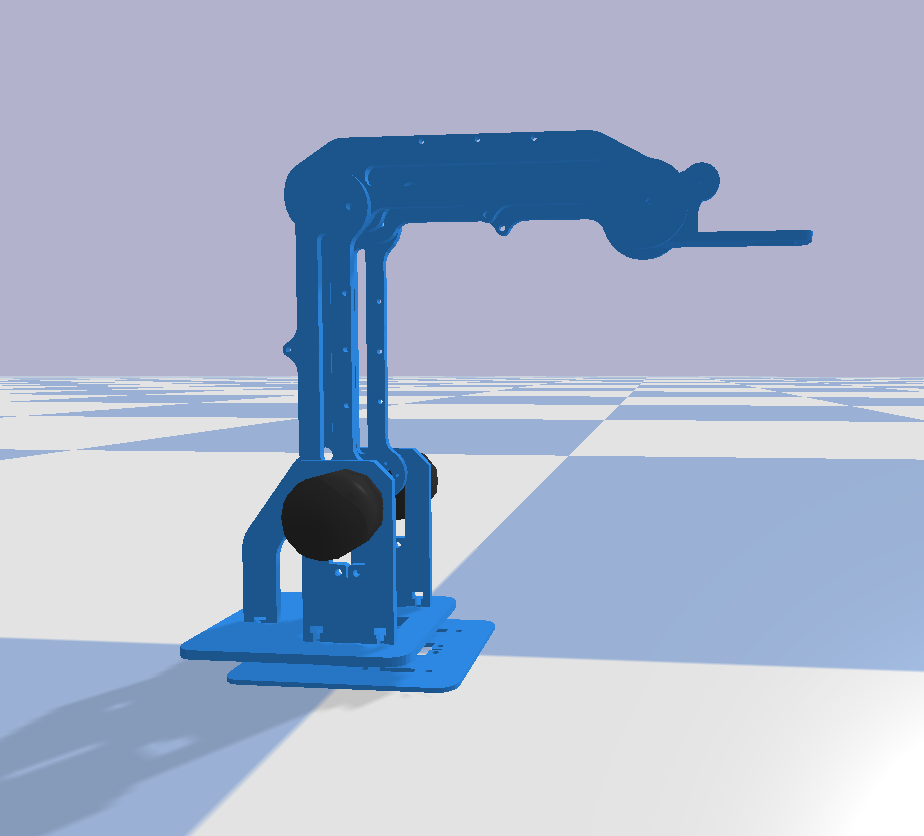
Dobot:
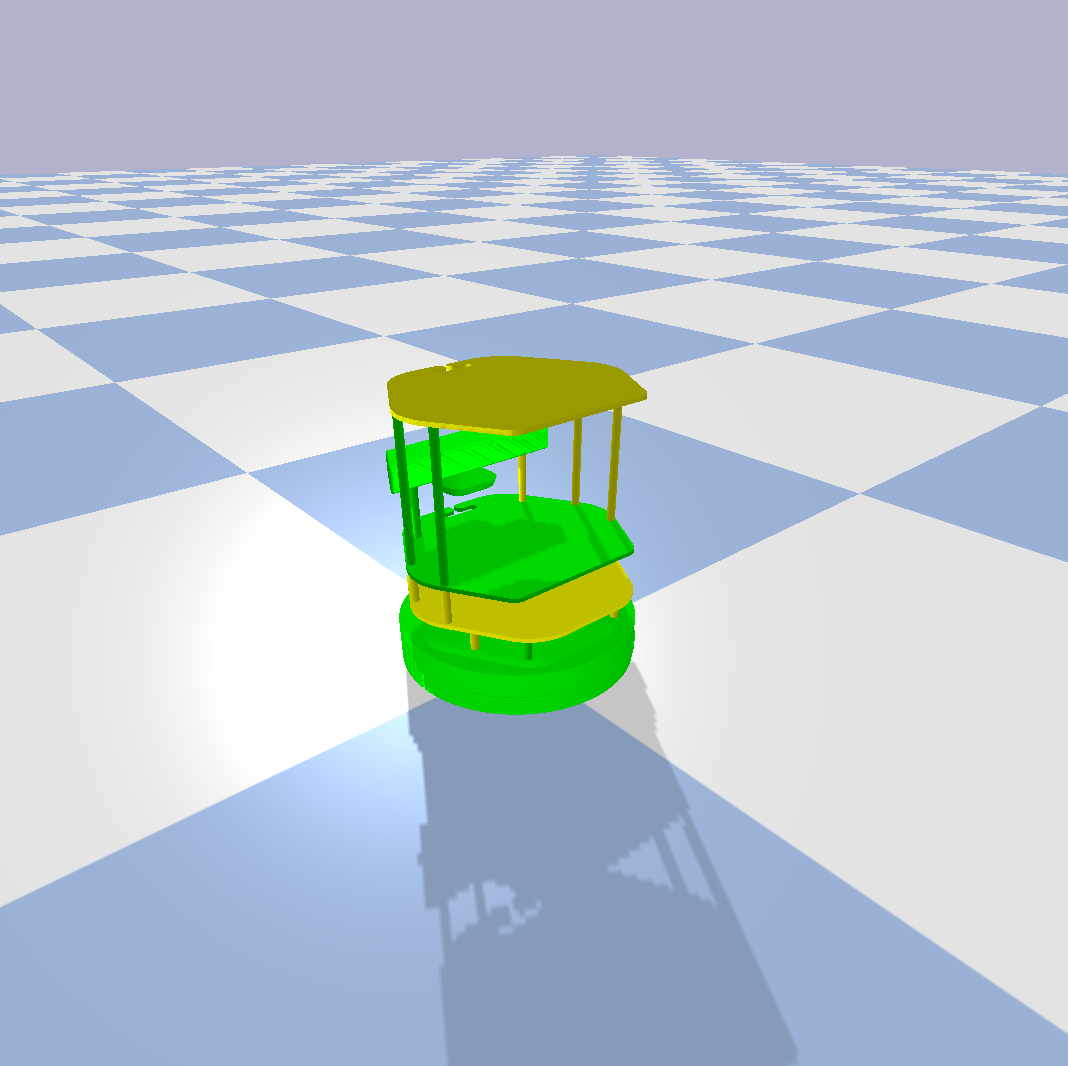
Turtebot:
Baxter:
Sawyer: