https://github.com/mrtaz77/mucu-microcontroller-project
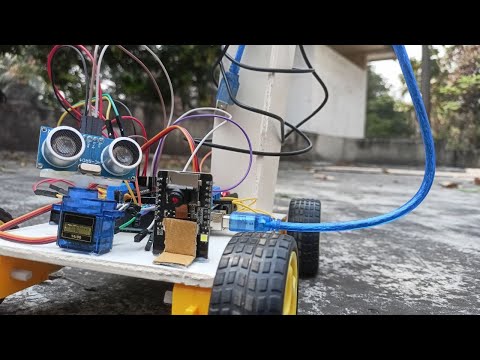
A Smart Automobile featuring bluetooth, voice control, automatic navigation using sonar, camera, gps navigation
https://github.com/mrtaz77/mucu-microcontroller-project
arduino atmega32 bluetooth-controlled-car camera gps-tracking microcontroller servo-motor sonar voice-control-car
Last synced: about 2 months ago
JSON representation
A Smart Automobile featuring bluetooth, voice control, automatic navigation using sonar, camera, gps navigation
- Host: GitHub
- URL: https://github.com/mrtaz77/mucu-microcontroller-project
- Owner: mrtaz77
- License: apache-2.0
- Created: 2024-01-31T12:38:58.000Z (over 2 years ago)
- Default Branch: main
- Last Pushed: 2024-03-27T09:01:43.000Z (over 2 years ago)
- Last Synced: 2024-03-27T11:27:42.690Z (over 2 years ago)
- Topics: arduino, atmega32, bluetooth-controlled-car, camera, gps-tracking, microcontroller, servo-motor, sonar, voice-control-car
- Language: C++
- Homepage:
- Size: 1.69 MB
- Stars: 0
- Watchers: 1
- Forks: 0
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- License: LICENSE
Awesome Lists containing this project
README
# MUCU, A Smart Automobile. Micro-controller Project.
**Youtube demo:**
[](https://www.youtube.com/watch?v=IHWIqOERDno)
## Content:
- [Presentation](/Presentation/presentation.pdf)
- [Codes](/Codes/)
- **Main**
- [Car Control](/Codes/car_mode_control.ino)
- [Camera](/Codes/camera.ino)
- **Testing**
- [GPS](/Codes/GPS_Testing.ino)
- [Sonar](/Codes/sonar_unit_testing.ino)
## Basic Connection Diagram

*This was modified for later use based on code.
## Features:
1. **Bluetooth Control**:
- Precise movement control.
- Commands sent via bluetooth.
- Commands include: forward, back, left, right, and stop.
2. **Voice Control**:
- Uses advanced Google speech-to-text technology to interpret spoken commands.
- Commands are seamlessly transmitted via Bluetooth.
3. **Obstacle Avoidance**:
- Uses a servo motor and an ultrasonic sensor.
- Obstacle detection at 20 cm.
- Iterative process ensures continuous obstacle avoidance.
- **Dynamic direction determination to reach destination.**
- Can be used for autonomous navigation & maze solving.
4. **Camera Control**:
- Integrates a high-resolution camera with a WiFi module for real-time streaming.
- Enhanced with an LED flashlight.
- Remote surveillance and exploration.
5. **GPS Control**:
- Precise navigation to destination latitude and longitude coordinate.
- **Bot is released facing north initially.**
- Constantly compares current location to determine route.
- **Monitored via Bluetooth.**
- Provides status updates including satellite locking and navigation progress.
**Example Cases for GPS Control (Current Latitude: 23.726 N, Longitude: 90.3905 E):**
1. Destination : (23.727 N, 90.3905 E)
- Bot moves north towards the destination.(No turn taken)
2. Destination : (23.724 N, 90.3905 E)
- Bot travels south toward the destination.(No turn taken)
3. Destination : (23.724 N, 90.38 E)
- Bot initially moves south, then turns left (west) when the latitude matches, and proceeds west to destination.
4. Destination : (23.726 N, 90.40 E)
- Bot turns right when the latitude aligns, then advances east to the destination.
5. Destination : (23.726 N, 90.3905 E)
- Bot recognizes arrival at the destination and remains stationary.