https://github.com/stack-of-tasks/pinocchio
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
https://github.com/stack-of-tasks/pinocchio
analytical-derivatives automatic-differentiation c-plus-plus casadi code-generation conda cppad dynamics fcl kinematics motion-planning pinocchio python rigid-body-dynamics robotics ros urdf
Last synced: 6 months ago
JSON representation
A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives
- Host: GitHub
- URL: https://github.com/stack-of-tasks/pinocchio
- Owner: stack-of-tasks
- License: bsd-2-clause
- Created: 2014-10-07T15:42:51.000Z (almost 12 years ago)
- Default Branch: devel
- Last Pushed: 2025-05-01T06:37:10.000Z (about 1 year ago)
- Last Synced: 2025-05-01T07:33:29.234Z (about 1 year ago)
- Topics: analytical-derivatives, automatic-differentiation, c-plus-plus, casadi, code-generation, conda, cppad, dynamics, fcl, kinematics, motion-planning, pinocchio, python, rigid-body-dynamics, robotics, ros, urdf
- Language: C++
- Homepage: http://stack-of-tasks.github.io/pinocchio/
- Size: 29.7 MB
- Stars: 2,339
- Watchers: 60
- Forks: 433
- Open Issues: 96
-
Metadata Files:
- Readme: README.md
- Changelog: CHANGELOG.md
- License: LICENSE
- Citation: CITATION.bib
Awesome Lists containing this project
- awesome-robotic-tooling - pinocchio - A fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives. (Planning and Control / Vector Map)
- awesome-space-robotics - Pinocchio - Fast and flexible C++ library for rigid body dynamics algorithms. (Manipulation / Dynamics & Control)
- awesome-simulation - Pinocchio
- awesome-biomechanics - source
- awesome-ai-robotics - **Pinocchio** - Pinocchio instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone's algorithms. Besides, Pinocchio provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm. (Learning Source / Dev Tools)
- awesome-robotics - Pinocchio - body dynamics and kinematics for humanoids. | (🦿 Humanoid & Legged Robots)
- awesome-weekly-robotics - pinocchio - a fast and flexible implementation of Rigid Body Dynamics algorithms and their analytical derivatives. Licence: BSD-2 Clause. (Libraries and Frameworks / Autopilots)
README









**Pinocchio** instantiates the state-of-the-art Rigid Body Algorithms for poly-articulated systems based on revisited Roy Featherstone's algorithms.
Besides, **Pinocchio** provides the analytical derivatives of the main Rigid-Body Algorithms, such as the Recursive Newton-Euler Algorithm or the Articulated-Body Algorithm.
**Pinocchio** was originally designed for robotics applications, but it can be used in other contexts (biomechanics, computer graphics, vision, etc.).
It is built upon Eigen for linear algebra and FCL for collision detection. **Pinocchio** includes a Python interface for fast code prototyping, [directly accessible](https://github.com/conda-forge/pinocchio-feedstock#installing-pinocchio) through [Conda](https://docs.conda.io/en/latest/).
**Pinocchio** is now at the heart of various robotics software as [Crocoddyl](https://github.com/loco-3d/crocoddyl/tree/devel), an open-source and efficient Differential Dynamic Programming solver for robotics, the [Stack-of-Tasks](http://stack-of-tasks.github.io), an open-source and versatile hierarchical controller framework, or the [Humanoid Path Planner](https://humanoid-path-planner.github.io/hpp-doc), open-source software for Motion and Manipulation Planning.
If you want to learn more about **Pinocchio** internal behaviors and main features, we invite you to read the related [paper](https://hal-laas.archives-ouvertes.fr/hal-01866228) and the online [documentation](https://gepettoweb.laas.fr/doc/stack-of-tasks/pinocchio/devel/doxygen-html/) or [DeepWiki](https://deepwiki.com/stack-of-tasks/pinocchio).
If you want to dive into **Pinocchio** directly, only one single line is sufficient (assuming you have Conda):
conda install pinocchio -c conda-forge
or via pip (currently only available on Linux):
pip install pin
## Table of contents
- [Table of contents](#table-of-contents)
- [Pinocchio main features](#pinocchio-main-features)
- [Documentation](#documentation)
- [Examples](#examples)
- [Tutorials](#tutorials)
- [Pinocchio continuous integrations](#pinocchio-continuous-integrations)
- [Performances](#performances)
- [Ongoing developments](#ongoing-developments)
- [Installation](#installation)
- [ROS](#ros)
- [Visualization](#visualization)
- [Citing Pinocchio](#citing-pinocchio)
- [Questions and Issues](#questions-and-issues)
- [Core-dev team](#core-dev-team)
- [Credits](#credits)
- [Open-source projects relying on Pinocchio](#open-source-projects-relying-on-pinocchio)
- [Acknowledgments](#acknowledgments)
## Pinocchio main features
**Pinocchio** is fast:
- C++ template library,
- cache friendly,
- support custom scalar type.
**Pinocchio** is versatile, implementing basic and more advanced rigid body dynamics algorithms:
- forward kinematics and its analytical derivatives,
- forward/inverse dynamics and their analytical derivatives,
- centroidal dynamics and its analytical derivatives,
- computations of kinematic and dynamic regressors for system identification and more,
- full support of closed-loop mechanisms,
- [state-of-the-art frictional contact solvers](https://hal.science/hal-04588906v1/file/simplecontacts2024.pdf),
- low-complexity constrained articulated body algorithms,
- [sparse constrained dynamics](https://laas.hal.science/hal-01790971v2/file/18-rss-analytical-derivatives-carpentier.pdf) and its analytical derivatives,
- full support of [multiple-precision floating-point (MPFR)](https://www.mpfr.org/) in Python and C++,
- support of modern and open-source Automatic Differentiation frameworks like [CppAD](https://github.com/coin-or/CppAD) or [CasADi](https://web.casadi.org/),
- automatic code generation support is available via [CppADCodeGen](https://github.com/joaoleal/CppADCodeGen).
**Pinocchio** can support description formats:
- URDF format,
- SDF format,
- MJCF format,
- SRDF format,
- programmatically.
**Pinocchio** is flexible:
- header only,
- template instantiation,
- C++ 11/14/17/20/23 compliant.
**Pinocchio** is extensible.
**Pinocchio** is multi-thread friendly.
**Pinocchio** is reliable and extensively tested (unit tests, simulations, and real-world robotics applications).
**Pinocchio** is supported and tested on Windows, Mac OS X, Unix, and Linux ([see build status here](http://robotpkg.openrobots.org/rbulk/robotpkg/math/pinocchio/index.html)).
## Documentation
The online **Pinocchio** documentation of the last release is available [here](https://gepettoweb.laas.fr/doc/stack-of-tasks/pinocchio/devel/doxygen-html/). A cheat sheet pdf with the main functions and algorithms can be found [here](https://github.com/stack-of-tasks/pinocchio/blob/devel/doc/pinocchio_cheat_sheet.pdf).
## Examples
In the [examples](https://github.com/stack-of-tasks/pinocchio/tree/devel/examples) directory, we provide some basic examples of using Pinocchio in Python.
Additional examples introducing **Pinocchio** are also available in the [documentation](https://gepettoweb.laas.fr/doc/stack-of-tasks/pinocchio/devel/doxygen-html/md_doc_d-practical-exercises_intro.html).
## Tutorials
**Pinocchio** comes with a large bunch of tutorials aiming at introducing the basic tools for robot control.
Tutorial and training documents are listed [here](https://gepettoweb.laas.fr/doc/stack-of-tasks/pinocchio/devel/doxygen-html/index.html#OverviewConclu).
You can also consider the interactive Jupyter notebook [set of tutorials](https://github.com/ymontmarin/_tps_robotique) developed by [Nicolas Mansard](https://gepettoweb.laas.fr/index.php/Members/NicolasMansard) and [Yann de Mont-Marin](https://github.com/ymontmarin).
## Pinocchio continuous integrations
**Pinocchio** is constantly tested for several platforms and distributions, as reported below:
CI on ROS

CI on Linux via APT

CI on macOS and Windows via Pixi

CI on Linux via Robotpkg

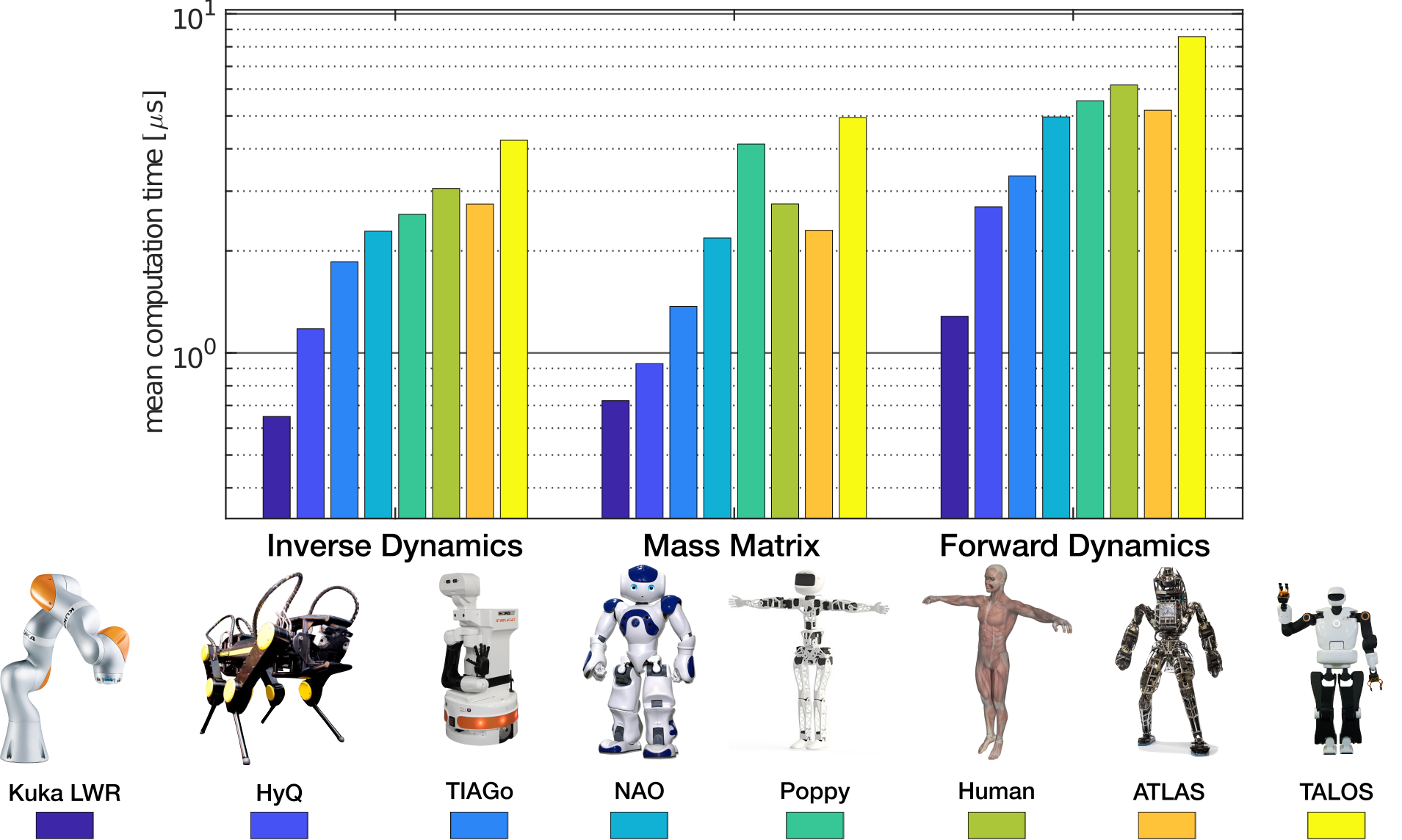
## Performances
**Pinocchio** exploits, at best, the sparsity induced by the kinematic tree of robotics systems. Thanks to modern programming language paradigms, **Pinocchio** can unroll most of the computations directly at compile time, allowing to achieve impressive performances for an extensive range of robots, as illustrated by the plot below, obtained on a standard laptop equipped with an Intel Core i7 CPU @ 2.4 GHz.
For other benchmarks, and mainly the capacity of Pinocchio to exploit, at best, your CPU capacities using advanced code generation techniques, we refer to the technical [paper](https://hal-laas.archives-ouvertes.fr/hal-01866228).
In addition, the [introspection](https://github.com/rbd-benchmarks/rbd-benchmarks) may also help you to understand and compare the performances of the modern rigid body dynamics libraries.
## Ongoing developments
If you want to follow the current developments, you can refer to the [devel branch](https://github.com/stack-of-tasks/pinocchio/tree/devel).
The [devel branch](https://github.com/stack-of-tasks/pinocchio/tree/devel/) only contains the latest release. Any new Pull Request should be submitted on the [devel branch](https://github.com/stack-of-tasks/pinocchio/tree/devel/).
## Installation
**Pinocchio** can be easily installed on various Linux (Ubuntu, Fedora, etc.) and Unix distributions (Mac OS X, BSD, etc.). Please refer to the [installation procedure](http://stack-of-tasks.github.io/pinocchio/download.html).
### Conda
You simply need this simple line:
```bash
conda install pinocchio -c conda-forge
```
### Docker
```
docker run --rm -it ghcr.io/stack-of-tasks/pinocchio:devel
```
### ROS
**Pinocchio** is also deployed on ROS.
You may follow its deployment status below.
If you're interested in using Pinocchio on systems and/or with packages that integrate with the ROS ecosystem, we recommend the installation of Pinocchio via the binaries distributed via the ROS PPA.
Here, you can install Pinocchio using:
```
sudo apt install ros-$ROS_DISTRO-pinocchio
```
This installs Pinocchio with Coal support for collision checking and with Python bindings.
You can then use Pinocchio in your ROS packages by:
* Depending on Pinocchio in your `package.xml` config (`pinocchio`)
* Including Pinocchio via CMake (`find_package(pinocchio REQUIRED)`) and linking against Pinocchio (`target_link_libraries(my_library pinocchio::pinocchio)`)
We include support and hooks to discover the package for ROS build systems.
A ROS 2 example can be found in [this repository](https://github.com/sea-bass/pinocchio_ros_cpp_example).
Please note that we always advise including the `pinocchio/fwd.hpp` header as the first include to avoid compilation errors from differing Boost-variant sizes.
| ROS 2 Distro | Build Status |
| ------------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
| **Humble** | [](https://build.ros2.org/job/Hbin_uJ64__pinocchio__ubuntu_jammy_amd64__binary) |
| **Jazzy** | [](https://build.ros2.org/job/Jbin_uN64__pinocchio__ubuntu_noble_amd64__binary) |
| **Kilted** | [](https://build.ros2.org/job/Kbin_uN64__pinocchio__ubuntu_noble_amd64__binary) |
| **Rolling** | [](https://build.ros2.org/job/Rbin_uN64__pinocchio__ubuntu_noble_amd64__binary) |
## Visualization
**Pinocchio** provides support for many open-source and free visualizers:
- [Gepetto Viewer](https://github.com/Gepetto/gepetto-viewer): a C++ viewer based on [OpenSceneGraph](https://github.com/openscenegraph/OpenSceneGraph) with Python bindings and Blender export. See [here](https://github.com/stack-of-tasks/pinocchio-gepetto-viewer) for a C++ example on mixing **Pinocchio** and **Gepetto Viewer**.
- [Meshcat](https://github.com/rdeits/meshcat): supporting visualization in Python and which can be embedded inside any browser.
- [Panda3d](https://github.com/ikalevatykh/panda3d_viewer): supporting visualization in Python and which can be embedded inside any browser.
- [RViz](https://github.com/ros-visualization/rviz): supporting visualization in Python and which can interact with other ROS packages.
- [Viser](https://github.com/nerfstudio-project/viser): supporting browser-based visualization in Python, with support for widgets such as sliders and interactive markers.
Many external viewers can also be integrated. For more information, see the example [here](https://github.com/stack-of-tasks/pinocchio/blob/devel/bindings/python/pinocchio/visualize/base_visualizer.py).
## Citing Pinocchio
To cite **Pinocchio** in your academic research, please consider citing the [software paper](https://laas.hal.science/hal-01866228v2/file/19-sii-pinocchio.pdf) and use the following BibTeX entry:
```bibtex
@inproceedings{carpentier2019pinocchio,
title={The Pinocchio C++ library -- A fast and flexible implementation of rigid body dynamics algorithms and their analytical derivatives},
author={Carpentier, Justin and Saurel, Guilhem and Buondonno, Gabriele and Mirabel, Joseph and Lamiraux, Florent and Stasse, Olivier and Mansard, Nicolas},
booktitle={IEEE International Symposium on System Integrations (SII)},
year={2019}
}
```
And the following one for the link to the GitHub codebase:
```bibtex
@misc{pinocchioweb,
author = {Justin Carpentier and Florian Valenza and Nicolas Mansard and others},
title = {Pinocchio: fast forward and inverse dynamics for poly-articulated systems},
howpublished = {https://stack-of-tasks.github.io/pinocchio},
year = {2015--2021}
}
```
## Citing specific algorithmic contributions
**Pinocchio** goes beyond implementing the standard rigid-body dynamics algorithms and results from active research on simulation, learning, and control.
**Pinocchio** provides state-of-the-art algorithms for handling constraints, differentiating forward and inverse dynamics, etc.
If you use these algorithms, please consider citing them in your research articles.
- Carpentier, J., Le Lidec, Q. & Montaut, L. (2024, July). [From Compliant to Rigid Contact Simulation: a Unified and Efficient Approach](https://hal.science/hal-04588906). In RSS 2024-Robotics: Science and Systems (RSS 2024).
- Le Lidec, Q., Jallet, W., Montaut, L., Laptev, I., Schmid, C., & Carpentier, J. (2024). [Contact models in robotics: a comparative analysis](https://hal.science/hal-04067291/). IEEE Transactions on Robotics.
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2024). [GJK++: Leveraging Acceleration Methods for Faster Collision Detection](https://hal.science/hal-04070039/). IEEE Transactions on Robotics.
- Sathya, A., & Carpentier, J. (2024). [Constrained Articulated Body Dynamics Algorithms](https://hal.science/hal-04443056/). IEEE Transactions on Robotics.
- Montaut, L., Le Lidec, Q., Bambade, A., Petrik, V., Sivic, J., & Carpentier, J. (2023, May). [Differentiable collision detection: a randomized smoothing approach](https://hal.science/hal-03780482/). In 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Montaut, L., Le Lidec, Q., Petrik, V., Sivic, J., & Carpentier, J. (2022, June). [Collision Detection Accelerated: An Optimization Perspective](https://hal.science/hal-03662157/). In Robotics: Science and Systems (RSS 2022).
- Carpentier, J., Budhiraja, R., & Mansard, N. (2021, July). [Proximal and sparse resolution of constrained dynamic equations](https://hal.science/hal-03271811/). In Robotics: Science and Systems (RSS 2021).
- Carpentier, J., & Mansard, N. (2018, June). [Analytical derivatives of rigid body dynamics algorithms](https://hal.science/hal-01790971/). In Robotics: Science and Systems (RSS 2018).
## Questions and Issues
Do you have a question or an issue? You may either directly open a [new question](https://github.com/stack-of-tasks/pinocchio/discussions/new?category=q-a) or a [new issue](https://github.com/stack-of-tasks/pinocchio/issues) or, directly contact us via the mailing list .
## Core-dev team
The currently active core developers of **Pinocchio** are:
- [Justin Carpentier](https://jcarpent.github.io) (Inria): main developer and manager of the project
- [Guilhem Saurel](https://www.laas.fr/fr/annuaire/gsaurel) (LAAS-CNRS): CI/CD, packaging
- [Etienne Arlaud](https://github.com/EtienneAr) (Inria): core developer
- [Wilson Jallet](https://github.com/ManifoldFR) (LAAS-CNRS/Inria): extension of Python bindings, C++ visualization API
- [Fabian Schramm](https://github.com/fabinsch) (Inria): core developper
- [Stéphane Caron](https://scaron.info) (Inria): core developper
- [Joris Vaillant](https://github.com/jorisv) (Inria): core developer and project manager
- [Megane Millan](https://github.com/MegMll) (Inria): core developer
- [Ajay Sathya](https://www.ajaysathya.com/) (Inria): core developer
## Credits
In addition to the core dev team, the following people have also been involved in the development of **Pinocchio** and are warmly thanked for their contributions:
- [Nicolas Mansard](http://projects.laas.fr/gepetto/index.php/Members/NicolasMansard) (LAAS-CNRS): initial project instructor
- [Joseph Mirabel](http://jmirabel.github.io/) (Eureka Robotics): Lie groups and hpp-fcl support
- [Antonio El Khoury](https://www.linkedin.com/in/antonioelkhoury) (Wandercraft): bug fixes
- [Gabriele Buondono](http://projects.laas.fr/gepetto/index.php/Members/GabrieleBuondonno) (LAAS-CNRS): features extension, bug fixes, and Python bindings
- [Florian Valenza](https://fr.linkedin.com/in/florian-valenza-1b274082) (Astek): core developments and hpp-fcl support
- [Wolfgang Merkt](http://www.wolfgangmerkt.com/) (University of Oxford): ROS integration and support
- [Rohan Budhiraja](https://scholar.google.com/citations?user=NW9Io9AAAAAJ) (Inria/LAAS-CNRS): features extension
- [Loïc Estève](https://github.com/lesteve) (Inria): Conda integration and support
- [Igor Kalevatykh](https://github.com/ikalevatykh) (Inria): Panda3d viewer support
- [Matthieu Vigne](https://github.com/matthieuvigne) (Wandercraft): MeshCat viewer support
- [Robin Strudel](https://www.di.ens.fr/robin.strudel/) (Inria): features extension
- [François Keith](https://scholar.google.fr/citations?user=cxSxXiQAAAAJ&hl=en) (CEA): Windows support
- [Sarah El Kazdadi](https://github.com/sarah-ek) (Inria): multi-precision arithmetic support
- [Nicolas Torres Alberto](https://scholar.google.com/citations?user=gYNLhEIAAAAJ&hl=en) (Inria): features extension
- [Shubham Singh](https://github.com/shubhamsingh91) (UT Austin): second-order inverse dynamics derivatives
- [Sebastian Castro](https://roboticseabass.com) (RAI Institute): Viser visualizer and MeshCat visualizer feature extension
- [Lev Kozlov](https://github.com/lvjonok): Kinetic and potential energy regressors
- [Simeon Nedelchev](https://github.com/simeon-ned): Pseudo inertia and Log-Cholesky parametrization
- [Alexy Legrand](https://www.linkedin.com/in/alexy-legrand-125889232/): Viser color bug fixes
- [Pierre Puchaud](https://github.com/ipuch): Ellipsoid Joint
- [Lucas Joseph](https://github.com/LucasJoseph): Ellipsoid Joint
If you have participated in the development of **Pinocchio**, please add your name and contribution to this list.
## Open-source projects relying on Pinocchio
- [Crocoddyl](https://github.com/loco-3d/crocoddyl): A software to realize model predictive control for complex robotics platforms.
- [TSID](https://github.com/stack-of-tasks/tsid/): A software that implements a Task Space Inverse Dynamics QP.
- [HPP](https://humanoid-path-planner.github.io/hpp-doc/): A SDK that implements motion planners for humanoids and other robots.
- [Jiminy](https://github.com/duburcqa/jiminy): A simulator based on Pinocchio.
- [ocs2](https://github.com/leggedrobotics/ocs2): A toolbox for Optimal Control for Switched Systems (OCS2)
- [TriFingerSimulation](https://github.com/open-dynamic-robot-initiative/trifinger_simulation): TriFinger Robot Simulation (a Robot to perform RL on manipulation).
- [Casadi_Kin_Dyn](https://github.com/ADVRHumanoids/casadi_kin_dyn): IIT Package for generation of symbolic (SX) expressions of robot kinematics and dynamics.
- [PyRoboPlan](https://github.com/sea-bass/pyroboplan): An educational Python library for manipulator motion planning using the Pinocchio Python bindings.
- [RoboPlan](https://github.com/open-planning/roboplan): A modern robot motion planning library based on Pinocchio, built in C++ with Python bindings (successor to PyRoboPlan).
- [ProxSuite-NLP](https://github.com/Simple-Robotics/proxsuite-nlp): A primal-dual augmented Lagrangian solver for nonlinear programming on manifolds.
- [Aligator](https://github.com/Simple-Robotics/aligator): A versatile and efficient framework for constrained trajectory optimization.
- [Simple](https://github.com/Simple-Robotics/Simple): The Simple Simulator: Simulation Made Simple.
- [LoIK](https://github.com/Simple-Robotics/LoIK): Low-Complexity Inverse Kinematics.
- [PlaCo](https://github.com/Rhoban/placo): Rhoban's planning and control library, featuring task-space inverse kinematics and dynamics high-level API for whole-body control tasks.
- [CRISP controllers](https://github.com/utiasDSL/crisp_controllers): Collection of real-time, C++ controllers for compliant torque-based control for manipulators compatible with `ros2_control`.
## Acknowledgments
The development of **Pinocchio** is actively supported by the [Gepetto team](http://projects.laas.fr/gepetto/) [@LAAS-CNRS](http://www.laas.fr) and the [Willow team](https://www.di.ens.fr/willow/) [@INRIA](http://www.inria.fr).