Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/stephane-caron/awesome-open-source-robots
A curated list of awesome robots that are fully open source
https://github.com/stephane-caron/awesome-open-source-robots
List: awesome-open-source-robots
awesome awesome-list open-source open-source-robots robotics robots
Last synced: 4 months ago
JSON representation
A curated list of awesome robots that are fully open source
- Host: GitHub
- URL: https://github.com/stephane-caron/awesome-open-source-robots
- Owner: stephane-caron
- License: cc0-1.0
- Created: 2022-04-25T15:39:30.000Z (almost 3 years ago)
- Default Branch: main
- Last Pushed: 2024-09-24T10:57:35.000Z (5 months ago)
- Last Synced: 2024-10-05T15:01:32.941Z (4 months ago)
- Topics: awesome, awesome-list, open-source, open-source-robots, robotics, robots
- Homepage:
- Size: 1.46 MB
- Stars: 41
- Watchers: 4
- Forks: 4
- Open Issues: 0
-
Metadata Files:
- Readme: README.md
- Contributing: CONTRIBUTING.md
- License: LICENSE
Awesome Lists containing this project
- awesome-robot-descriptions - Awesome Open Source Robots
README
# Awesome Open Source Robots [](https://awesome.re)
A curated list of awesome robots with open source software, open hardware, and in the best cases both.
## Contents
* [Gallery](#gallery)
* [Robots](#robots)
* [Arms](#arms)
* [Bipeds](#bipeds)
* [Educational](#educational)
* [Humanoids](#humanoids)
* [Hybrid](#hybrid)
* [Parallel](#parallel)
* [Quadrupeds](#quadrupeds)
* [Wheeled](#wheeled)
* [Adding a Robot to the List](#adding-a-robot-to-the-list)
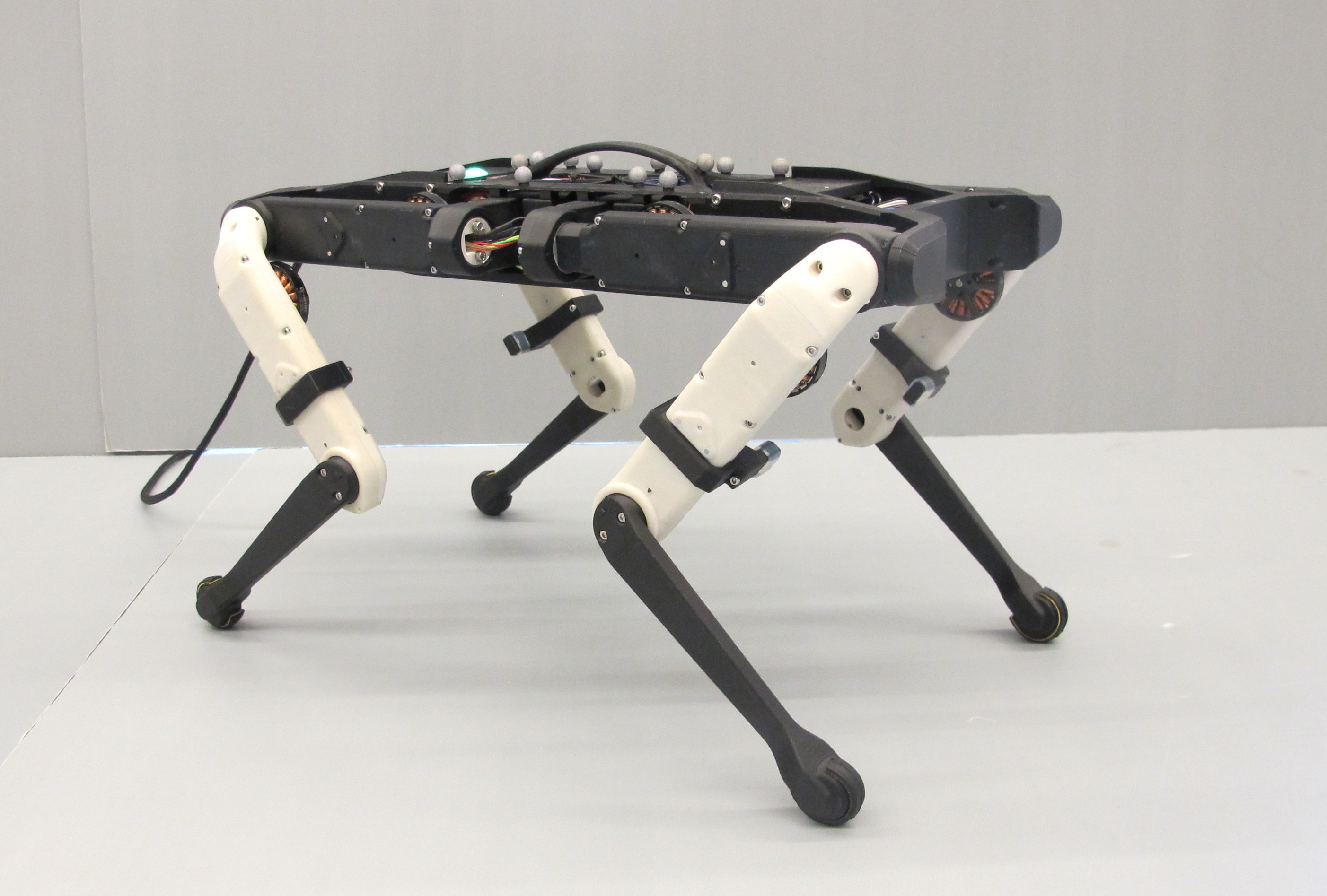
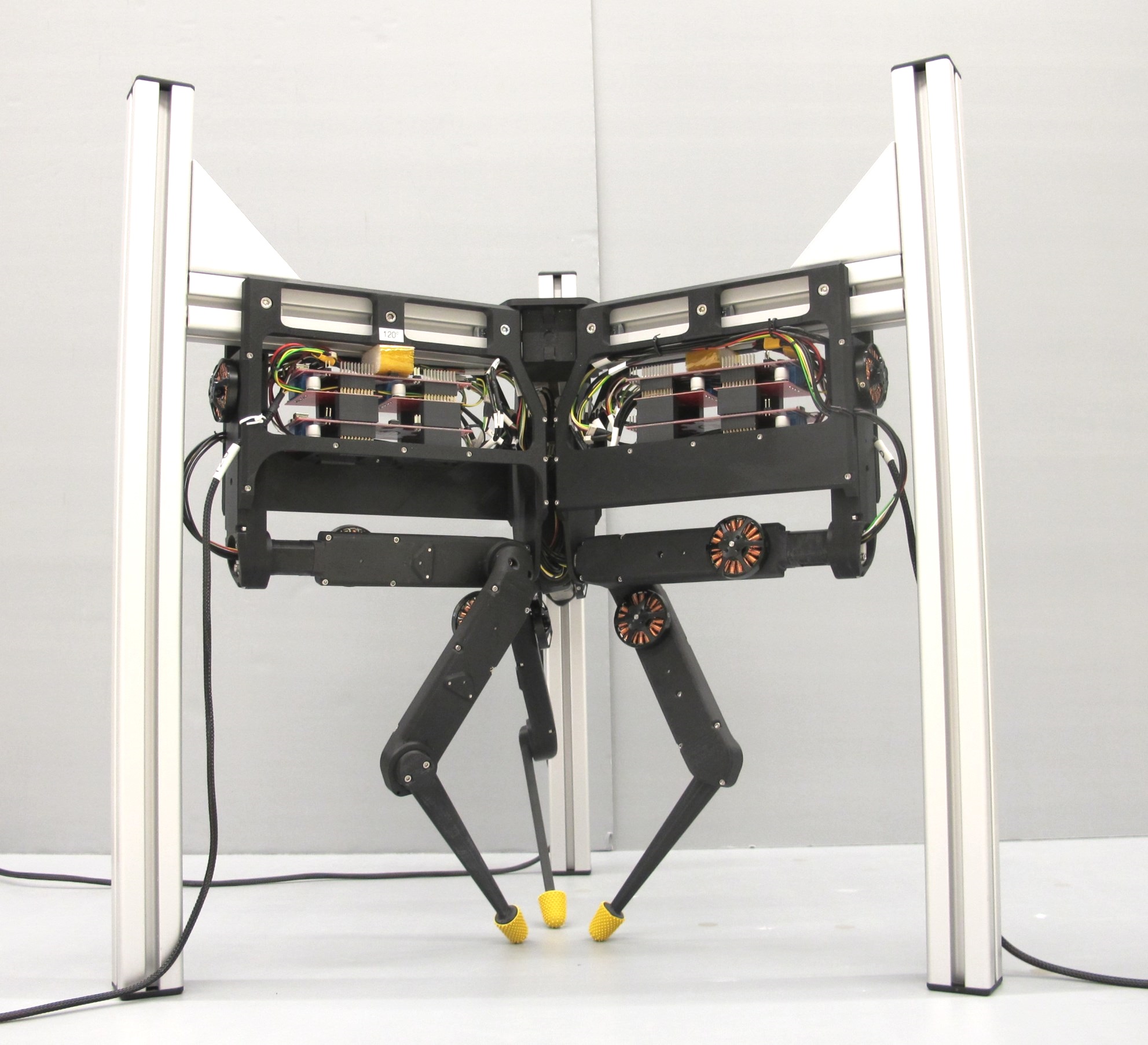
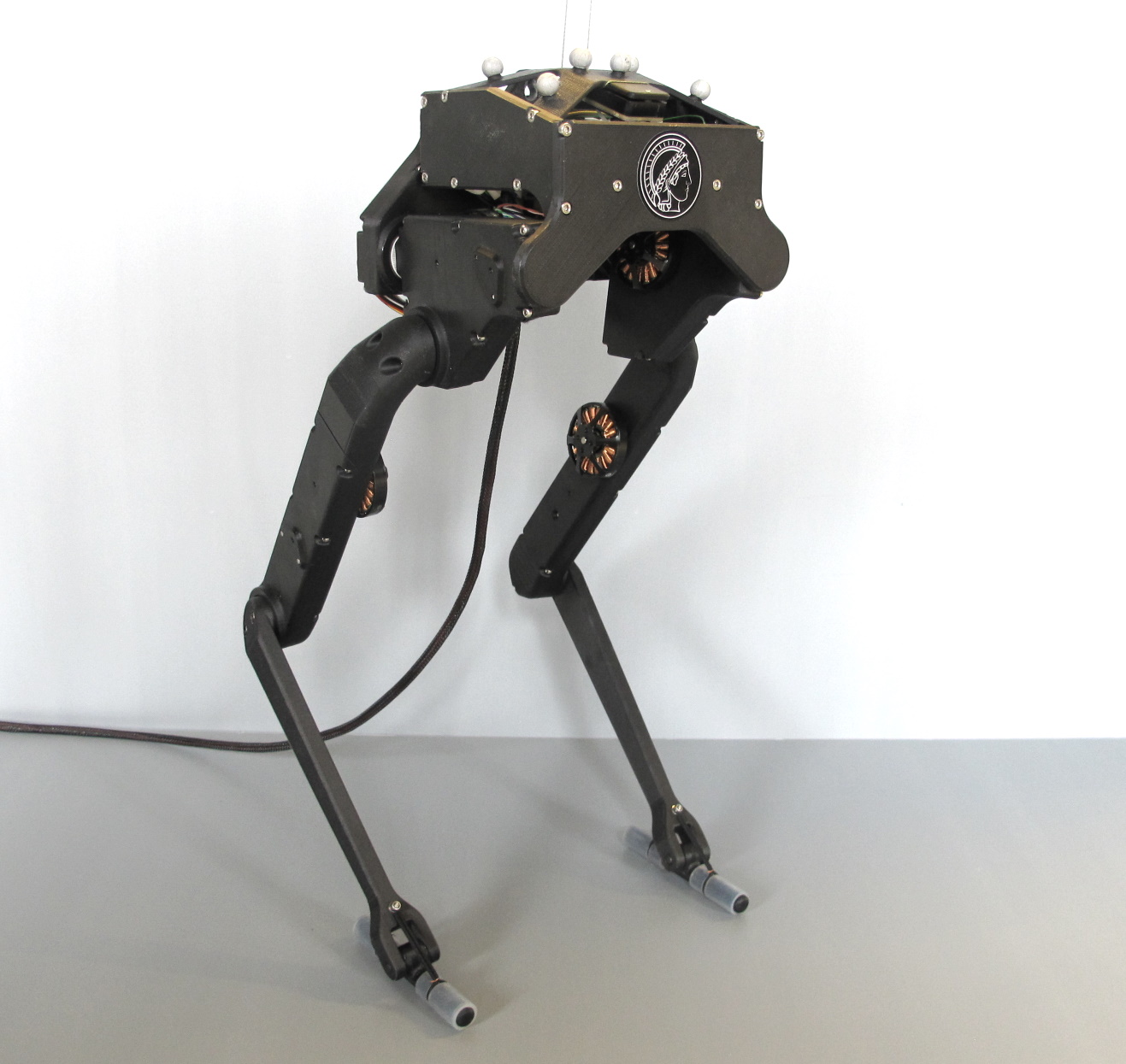
## Gallery
|  |
|  |
|  |
|  |
|
|--|--|--|--|
|  |
|  |
|  |
|  |
|
|  |
|  |
|  |
|  |
|
|  | | | |
| | | |
## Robots
### Arms
| Name | Maker | Hardware | HW License | Software | SW License |
|------|-------|----------|------------|----------|------------|
| [Koch v1.1](https://github.com/jess-moss/koch-v1-1) | Jess Moss | [GitHub](https://github.com/jess-moss/koch-v1-1/tree/main/hardware) | Apache-2.0 | [GitHub](https://github.com/AlexanderKoch-Koch/low_cost_robot/blob/main/robot.py) | MIT |
| [low\_cost\_robot](https://tau-robotics.com/robots) | Alexander Koch | [GitHub](https://github.com/AlexanderKoch-Koch/low_cost_robot/tree/main/hardware) | MIT | [GitHub](https://github.com/AlexanderKoch-Koch/low_cost_robot/tree/main/simulation) | MIT |
| [Thor](http://thor.angel-lm.com/) | Ángel L.M. | [GitHub](https://github.com/AngelLM/Thor) | CC-BY-SA-4.0 | [GitHub](https://github.com/AngelLM/grbl/) | GPL-3.0 |
### Bipeds
| Name | Type | Hardware | HW License | Software | SW License |
|------|------------|----------|------------|----------|------------|
| [Bolt](https://www.youtube.com/watch?v=x2jYQdjT_es) | Point-foot | [Instructions](https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware/blob/master/mechanics/biped_6dof_v1/README.md#biped-robot-6dof-v1) | BSD-3-Clause | [GitHub](https://github.com/orgs/open-dynamic-robot-initiative/repositories?for=bolt) | BSD-3-Clause |
| [Kayra](https://youtu.be/ZpM4JqCai9M) | Flat-foot | [Overview](https://kayra.org/en/1-how-to-build/build-overview) | BSD-3-Clause | [GitHub](https://github.com/assadollahi/kayra) | BSD-3-Clause |
| [Open Duck Mini](https://github.com/apirrone/Open_Duck_Mini) | Point-foot | [GitHub](https://github.com/apirrone/Open_Duck_Mini/tree/main/mini_bdx/robots/bdx) | Apache-2.0 | [GitHub](https://github.com/apirrone/Open_Duck_Mini/tree/main) | Apache-2.0 |
| [TipTap](https://hackaday.io/project/163093-tiptap) | Point-foot | [GitHub](https://github.com/DarrenLevine/TipTap/tree/master/parts) | MIT | [GitHub](https://github.com/DarrenLevine/TipTap/tree/master/software) | MIT |
| [Upkie](https://hackaday.io/project/185729-upkie-wheeled-biped-robot) | Wheeled | [Wiki](https://github.com/upkie/upkie/wiki) | Apache-2.0 | [GitHub](https://github.com/upkie/upkie) | Apache-2.0 |
### Educational
| Name | Maker | Hardware | HW License | Software | SW License |
|-------|-------|----------|------------|----------|------------|
| [Rotary Inverted Pendulum](https://github.com/ferrolho/rotary-inverted-pendulum/tree/main) | [Henrique Ferrolho](https://github.com/ferrolho) | [Instructions](https://github.com/ferrolho/rotary-inverted-pendulum/blob/main/README.md), [Meshes](https://github.com/ferrolho/rotary-inverted-pendulum/tree/main/meshes) | MIT | [Arduino](https://github.com/ferrolho/rotary-inverted-pendulum/tree/main/RotaryInvertedPendulum-arduino), [Julia](https://github.com/ferrolho/rotary-inverted-pendulum/tree/main/RotaryInvertedPendulum-julia), [Python](https://github.com/ferrolho/rotary-inverted-pendulum/tree/main/RotaryInvertedPendulum-python) | MIT |
### Humanoids
| Name | Maker | Hardware | HW License | Software | SW License |
|-------|-------|----------|------------|----------|------------|
| [NimbRo-OP2X](https://github.com/NimbRo/nimbro-op2) | NimbRo team | [GitHub](https://github.com/NimbRo/nimbro-op2/tree/master/NimbRo-OP2X/CAD) | CC-BY-NC-SA-3.0 | [Software](https://github.com/NimbRo/nimbro-op-ros?tab=License-1-ov-file#readme) | BSD-3-Clause |
| [Poppy Ergo Jr](https://github.com/poppy-project/poppy-ergo-jr/) | Poppy project | [Hardware](https://github.com/poppy-project/poppy-ergo-jr/tree/master/hardware) | CC-BY-SA-4.0 | [Software](https://github.com/poppy-project/poppy-ergo-jr/tree/master/software) | GPL-3.0 |
| [Poppy Humanoid](https://www.poppy-project.org/en/robots/poppy-humanoid/) | Poppy project | [Hardware](https://github.com/poppy-project/poppy-humanoid/tree/master/hardware) | CC-BY-SA-4.0 | [GitHub](https://github.com/poppy-project/poppy-humanoid/tree/master/software) | GPL-3.0 |
### Hybrid
| Name | Hardware | HW License | Software | SW License |
|-------|----------|------------|----------|------------|
| [Acromonk](https://github.com/dfki-ric-underactuated-lab/acromonk) | [GitHub](https://github.com/dfki-ric-underactuated-lab/acromonk/tree/main/hardware) | BSD-3-Clause | [GitHub](https://github.com/dfki-ric-underactuated-lab/acromonk/tree/main/software) | BSD-3-Clause |
| [Borinot](http://www.iri.upc.edu/borinot) | [Hardware](https://github.com/hidro-iri/Borinot/blob/main/hardware/README.md) | BSD-3-Clause | [GitHub](https://github.com/hidro-iri/Borinot/blob/main/software/README.md) | BSD-3-Clause |
### Parallel
| Name | Hardware | HW License | Software | SW License |
|-------|----------|------------|----------|------------|
| [TriFingerEdu](https://webdav.tuebingen.mpg.de/trifinger/) | [Instructions](https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware/blob/master/mechanics/tri_finger_edu_v1/README.md#trifingeredu-v1) | BSD-3-Clause | [GitHub](https://github.com/orgs/open-dynamic-robot-initiative/repositories?for=trifinger_edu) | BSD-3-Clause |
### Quadrupeds
| Name | Hardware | HW License | Software | SW License |
|-------|----------|------------|----------|------------|
| [DIY hobby servos quadruped](https://hackaday.io/project/171456-diy-hobby-servos-quadruped-robot) | [Hackaday.io](https://hackaday.io/project/171456/instructions) | ❌ CC-BY-NC-SA-3.0 | [GitHub](https://github.com/miguelasd688/4-legged-robot-model) | GPL-3.0 |
| [mjbots quad](https://hackaday.io/project/167845-mjbots-quad) | [Fusion 360](https://myhub.autodesk360.com/ue2cb4876/g/shares/SH56a43QTfd62c1cd968fcf1b110c6f45fbb) | ❌ | [GitHub](https://github.com/mjbots/quad/) | Apache-2.0 |
| [Petoi Robot Cat Nybble](https://www.petoi.com/collections/robots/products/petoi-nybble-robot-cat) | ❌ | ❌ | [OpenCat](https://github.com/PetoiCamp/OpenCat) | MIT |
| [Solo](https://www.youtube.com/watch?v=VjpmQ9MsLKg) | [Instructions](https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware/blob/master/mechanics/quadruped_robot_12dof_v1/README.md#quadruped-robot-12dof-v1) | CC0-1.0 | [GitHub](https://github.com/orgs/open-dynamic-robot-initiative/repositories?for=solo) | CC0-1.0 |
### Wheeled
| Name | License | Build | Software |
|------|---------|-------|----------|
| [Hoverbot](https://www.youtube.com/watch?v=syxE1NEU7lw) | Apache-2.0 | [GitHub](https://github.com/mjbots/hoverbot/blob/main/BOM.md) | [GitHub](https://github.com/mjbots/hoverbot/) |
| [JPL Open Source Rover](https://open-source-rover.readthedocs.io/en/latest/) | Apache-2.0 | [Build](https://github.com/nasa-jpl/open-source-rover#rover-build-roadmap) | [GitHub](https://github.com/nasa-jpl/osr-rover-code) |
| [OpenScout](https://hackaday.com/2022/09/26/robotic-platform-is-open-sourced-and-user-friendly/) | GPL-3.0 | [Manual](https://github.com/cbedio/OpenScout/blob/main/Documentation/CAD_Files/Instruction_Manual/InstructionManual.pdf) | [GitHub](https://github.com/cbedio/OpenScout) |
| [WheelBot](https://sites.google.com/view/wheelbot) | GPL-3.0 | [GitHub](https://github.com/AndReGeist/wheelbot-v2.5) | [GitHub](https://github.com/AndReGeist/wheelbot-v2.5/tree/main/firmware) |
## Adding a Robot to the List
New robots are welcome to the list, as long as they are [open source](CONTRIBUTING.md) in both hardware and software.