Ecosyste.ms: Awesome
An open API service indexing awesome lists of open source software.
https://github.com/ethz-asl/maplab
A Modular and Multi-Modal Mapping Framework
https://github.com/ethz-asl/maplab
mapping not-matlab slam
Last synced: about 1 month ago
JSON representation
A Modular and Multi-Modal Mapping Framework
- Host: GitHub
- URL: https://github.com/ethz-asl/maplab
- Owner: ethz-asl
- License: apache-2.0
- Created: 2017-11-27T21:58:23.000Z (over 6 years ago)
- Default Branch: master
- Last Pushed: 2024-04-30T10:42:09.000Z (about 2 months ago)
- Last Synced: 2024-05-03T16:21:36.477Z (about 2 months ago)
- Topics: mapping, not-matlab, slam
- Language: C++
- Homepage: https://maplab.asl.ethz.ch
- Size: 73.1 MB
- Stars: 2,471
- Watchers: 144
- Forks: 716
- Open Issues: 114
-
Metadata Files:
- Readme: README.md
- Contributing: .github/CONTRIBUTING.md
- License: LICENSE
Lists
- awesome-robotic-tooling - maplab - An open visual-inertial mapping framework. (Simultaneous Localization and Mapping / Lidar)
- awesome_3DReconstruction_list - MAPLAB-ROVIOLI
- Awesome-SLAM - maplab - inertial mapping framework. (3. Visual Inertial SLAM / 3.1 Framework)
- awesome-3D-vision - MAPLAB-ROVIOLI
- awesome_slam_papers - MAPLAB-ROVIOLI
- awesome-robotic-tooling - maplab - An open visual-inertial mapping framework. (Simultaneous Localization and Mapping / Lidar)
- awesome-stars - ethz-asl/maplab - A Modular and Multi-Modal Mapping Framework (C++)
- awesome-mobile-robotics - maplab - Modal Mapping Framework (Softwares and Libraries)
- Awesome-SLAM - [Code
- awesome-SLAM-algorithm - MAPLAB-ROVIOLI
- my-awesome-stars - ethz-asl/maplab - An open visual-inertial mapping framework. (C++)
README

*Ubuntu 18.04+ROS melodic*: [](https://jenkins.asl.ethz.ch/job/maplab_nightly)
[](https://jenkins.asl.ethz.ch/job/maplab_docs)
## News
* **November 2022:** maplab 2.0 initial release with new features and sensors. [Paper](https://arxiv.org/pdf/2212.00654.pdf).
* **July 2018:** Check out our release candidate with improved localization and lots of new features! [Release 1.3](https://github.com/ethz-asl/maplab/releases/tag/1.3).
* **May 2018:** maplab was presented at [ICRA](https://icra2018.org/) in Brisbane. [Paper](https://arxiv.org/abs/1711.10250) / [Initial Release](https://github.com/ethz-asl/maplab/releases/tag/initial_release).
## Description
This repository contains **maplab 2.0**, an open research-oriented mapping framework, written in C++, for multi-session and multi-robot mapping. For the original maplab release from 2018 the source code and documentation is available [here](https://github.com/ethz-asl/maplab/releases/tag/1.3).
**For documentation, tutorials and datasets, please visit the [wiki](https://maplab.asl.ethz.ch/index.html).**
## Features
### Robust visual-inertial odometry with localization

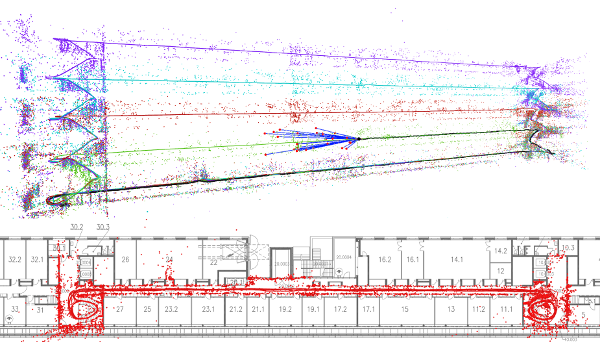
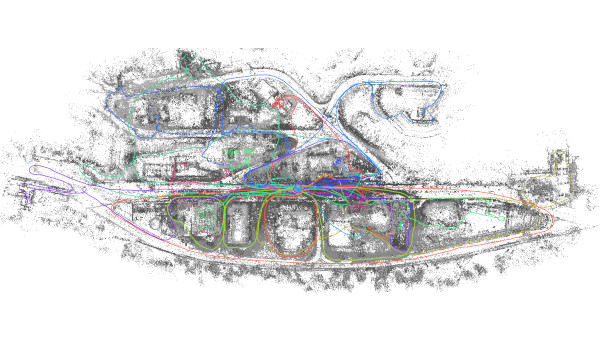
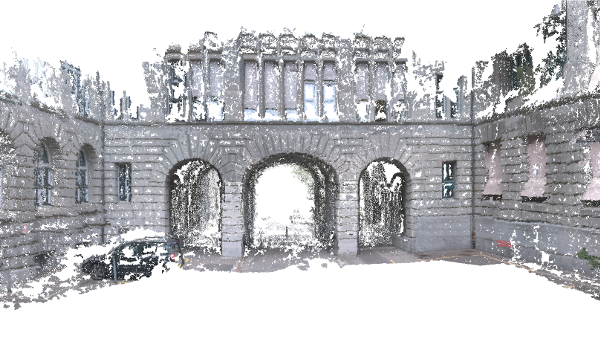
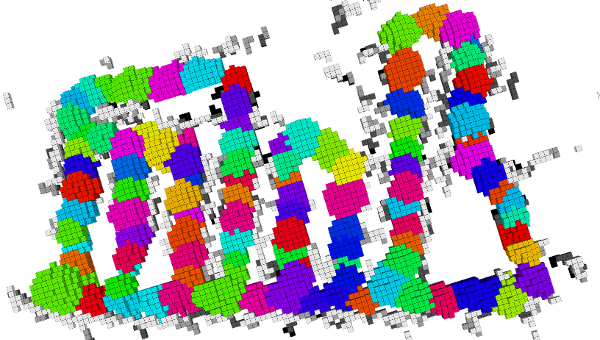
### Large-scale multisession mapping and optimization
### Multi-robot mapping and online operation
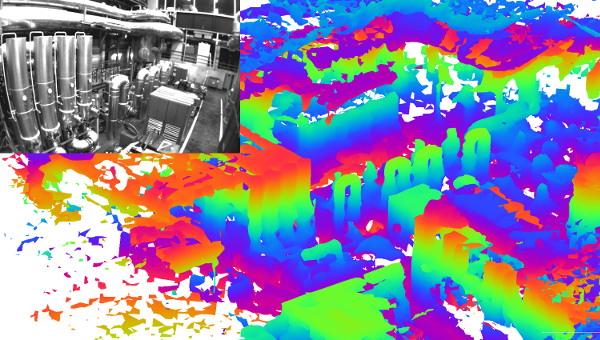
### Dense reconstruction
### A research platform extensively tested on real robots
## Installation and getting started
The following articles help you with getting started with maplab and ROVIOLI:
- [Installation on Ubuntu 18.04 or 20.04](https://maplab.asl.ethz.ch/docs/master/pages/installation/A_Installation-Ubuntu.html)
- [Introduction to the maplab framework](https://maplab.asl.ethz.ch/docs/master/pages/overview_and_introduction/A_The-Maplab-Framework.html)
- [Running ROVIOLI in VIO mode](https://maplab.asl.ethz.ch/docs/master/pages/tutorials-rovioli/B_Running-ROVIOLI-in-VIO-mode.html)
- [Basic console usage](https://maplab.asl.ethz.ch/docs/master/pages/tutorials-maplab/basics/A_Basic-Console-Usage.html)
- [Console map management](https://maplab.asl.ethz.ch/docs/master/pages/tutorials-maplab/basics/C_Console-map-management.html)
**More detailed information can be found in the [wiki pages](https://maplab.asl.ethz.ch/index.html).**
## Research Results
The maplab framework has been used as an experimental platform for numerous scientific publications. For a complete list of publications please refer to [Research based on maplab](https://maplab.asl.ethz.ch/docs/master/pages/overview_and_introduction/C_Related-Research.html#additional-citations).
## Citing
Please cite the following papers [maplab](https://arxiv.org/abs/1711.10250) and [maplab 2.0](https://arxiv.org/abs/2212.00654) when using our framework for your research:
```bibtex
@article{schneider2018maplab,
title={{maplab: An Open Framework for Research in Visual-inertial Mapping and Localization}},
author={T. Schneider and M. T. Dymczyk and M. Fehr and K. Egger and S. Lynen and I. Gilitschenski and R. Siegwart},
journal={IEEE Robotics and Automation Letters},
volume={3},
number={3},
pages={1418--1425},
year={2018},
doi={10.1109/LRA.2018.2800113}
}
```
```bibtex
@article{cramariuc2022maplab,
title={{maplab 2.0 – A Modular and Multi-Modal Mapping Framework}},
author={A. Cramariuc and L. Bernreiter and F. Tschopp and M. Fehr and V. Reijgwart and J. Nieto and R. Siegwart and C. Cadena},
journal={IEEE Robotics and Automation Letters},
volume={8},
number={2},
pages={520-527},
year={2023},
doi={10.1109/LRA.2022.3227865}
}
```
### Additional Citations
Certain components of maplab are directly based on [other publications](https://maplab.asl.ethz.ch/docs/master/pages/overview_and_introduction/B_Citing-Maplab).
## Credits
* Thomas Schneider
* Marcin Dymczyk
* Marius Fehr
* Kevin Egger
* Simon Lynen
* Mathias Bürki
* Titus Cieslewski
* Timo Hinzmann
* Mathias Gehrig
* Florian Tschopp
* Andrei Cramariuc
* Lukas Bernreiter
For a complete list of contributors, have a look at [CONTRIBUTORS.md](https://github.com/ethz-asl/maplab/blob/master/CONTRIBUTORS.md)